需求分析¶
雷达资料的质量控制¶
传统多普勒(单偏振)气象雷达数据质量控制与同化¶
因为雷达在运行过程基本不保存IQ信号,改方案主要在基数据(即Z,V,和W)的基础上开展雷达资料的质量控制工作。针对国内雷达资料和辽宁雷达的数据特征,质量控制主要涉及包括以下几个方面的工作:地物杂波剔除、异常传播杂波的识别、晴空回波的识别与剔除、径向干扰回识别与剔除、径向速度退模糊, 从基数据角度对雷达信号质量进行控制,利用杂波的统计特性将其从有效气象信号中剔除。
径向干扰杂波的质量控制¶
雷达波束受到干扰回波产生时,相应方位会出现非常狭长且相对较强的雷达回波,这是径向干扰回波的重要数据特征。在实际业务应用中,雷达径向干扰数据的特征可以划分为以下几种类型:(1)孤立型:径向宽度仅为1°,发生此类径向干扰时,相应径向与两侧的回波梯度均与其回波率因子值相等;(2)连续型:径向宽度在1~10°之间,整体的长度在230km~460km之间;回波较强且连续不间断是这类径向干扰的重要数据特征;(3)间断型:径向宽度在1~10°之间,由于干扰信号的间断性影响,距离库长度在100km~460km之间,大部分径向集中在230~460km处。中间部分的间断不连续是间断型径向干扰的重要特征;(4)松散型:由于干扰信号非常散乱,导致相应的雷达反射率因子沿径向非常不连续。这类回波通常集中在某几个方位角度方向上, 径向宽度通常为1~10°之间。这样的径向干扰的距离库长通常大于150km。
基于以上雷达径向干扰特征,可以逐步识别并剔除被干扰的雷达径向回波数据:(1)参照SCIT算法,采用反射率因子阈值15dBZ,基于雷达方位距离结构识别径向宽度为1~10°的段,然后沿径向距离方向组合将相邻数据段组合成风暴单体;如果组合后的风暴单体的方位宽度小或等于10°且距离长度在150km以上,则认为该风暴单体是径向干扰造成的虚假回波。这个步骤可以识别大部分连续型和间断型径向干扰。(2)直接剔除目标径方位上两侧回波梯度均等于目标径向本身观测值的反射率因子。这个步骤主要处理孤立型干扰。(3)然后统计径向数据段集中的方位角度。如果某方位角度上聚集了150以上的距离库,则认为相应的方位角发生了径向干扰。这个步骤主要处理松散型径向干扰。
具体实施过程中,可以针对径向干扰造成的回波污染,充分利用径向干扰信号的径向延伸特征,径向速度特征和反射率因子的垂直连续性特征,构建相应的启发式处理方案.
能流泄漏回波的质量控制¶
能流泄漏是雷达接收信号的过程中,受到内部电子元器件的影响,导致雷达回波大面积污染的一种数据现象。能流泄漏严重时,被污染的回波会充斥雷达探测范围的全部360个方位和460km范围的全部距离库。这类回波具有以下特点:(1)出现具有非常强的随机性,仰角和方位角均不确定;(2)很强的虚假回波;(3)径向速度也可能被污染,所以径向速度不可参考。(4)沿径向方向,观测数据呈递增趋势但变化范围很小。(5)沿方位方向,观测数据变化不大。
针对这类雷达回波可以参照以下步骤进行处理:(1)数据定位:基于雷达数据的径向方位组织结构,识别雷达回波60~80dBz以上占据有效回波占据相当比例(5%~10%),且与其他仰角层回波统计数据的方差非常小;(2)径向识别:连续搜索沿径向强度在40dBz以上且连续变化小于5dBz的雷达径向观测资料;(3)订正:采用三参数方案( \(Zo = Zc + Zr +alog(r)\) ),分析并订正得到的径向观测资料。( \(Zo\) :实际观测值,\(Zc\) :订正值, \(Zr\) :噪声项,\(alog(r)\) :非线性变化项)。具体实施方案时,参照最新的处理处理方案执行。
反射率因子与地面雨滴谱的比对与标校¶
本研究将雷达的所有部件作为一个整体进行校准,首先基于T-matrix散射矩阵方法和本地雨滴谱数据计算雷达相关参量,将计算结果与雷达实测数据进行大规模比较,从而得到雷达测量的数据在不同降水类型下的系统测量误差,并将该系统误差应用到雷达的实测数据中。
\(T-Matrix\) 方法是由P.C.Waterman et al.(1965)正式介绍的,在随后相关领域研究和文章中被广泛应用和推广。\(T\) 矩阵法是计算非球形粒子散射、解释非球形粒子散射特性的有效方法之一,已成为处理电磁、声波和弹性波散射等广阔科学领域的核心技术。在 \(T\) 矩阵法中,入射和散射的电场在一系列合适的(矢量)球谐函数中扩展,并且通过过渡矩阵( \(T\) 矩阵)来建立各个展开系数的列之间的关系。入射和散射场矢量球谐函数展开形式如下(Bo Peterson et al.,1974;郭丽君等,2014):
其中 \(D_v\) 是标准化系数,\(M_v^1\) 、\(N_v^1\) 、\(M_v^3\) 、\(N_v^3\) 是矢量球谐函数,\(a_v\) 、\(b_v\) 、\(f_v\) 、 \(g_v\) 为矢量球谐函数的展开系数,则散射场展开系数可由入射场展开系数通过下式确定:
其中 \(T\) 为转换矩阵,通过在散射体表面的二维数值积分求得(BARBER P et al.,1975),从而得到散射场。\(T\) 矩阵算法的核心是计算矩阵 \(T\) ,求得 \(T\) 就能求得散射场,进而求得任意方向上的散射截面 \(\sigma ( \theta_s )\) ,
其中 \(\vec{F}\) 为散射场远场矢量振幅,\(\theta_s\) 为散射角,当 \(\theta_s = \pi\) 时,得到后向散射截面。
地物杂波的质量控制¶
利用移动目标检测(MTD)的方案对地物杂波进行抑制并清除,从而得到仅包含降水信号的有效数据,在此方案中,将同时考虑地物杂波的统计特性以及对径向速度(V)的不敏感性。
MTD(Sawyer et al.,1985)为一种抑制低速杂波的数字运动目标指示器雷达系统,其利用新的技术识别径向速度小于预定值的目标物雷达回波。该方法通过计算作为相干相位检测器输出信号幅度和径向目标速度的函数的滤波器输出,并将这些值存储在一个可由相干相位输出信号幅度来处理的只读存储器中,然后可以进行比较以确定来自滤波器的哪个信号是来自径向速度等于或小于径向目标速度的目标,这样的滤波器输出信号就可以被拒绝。MTD流程如下:
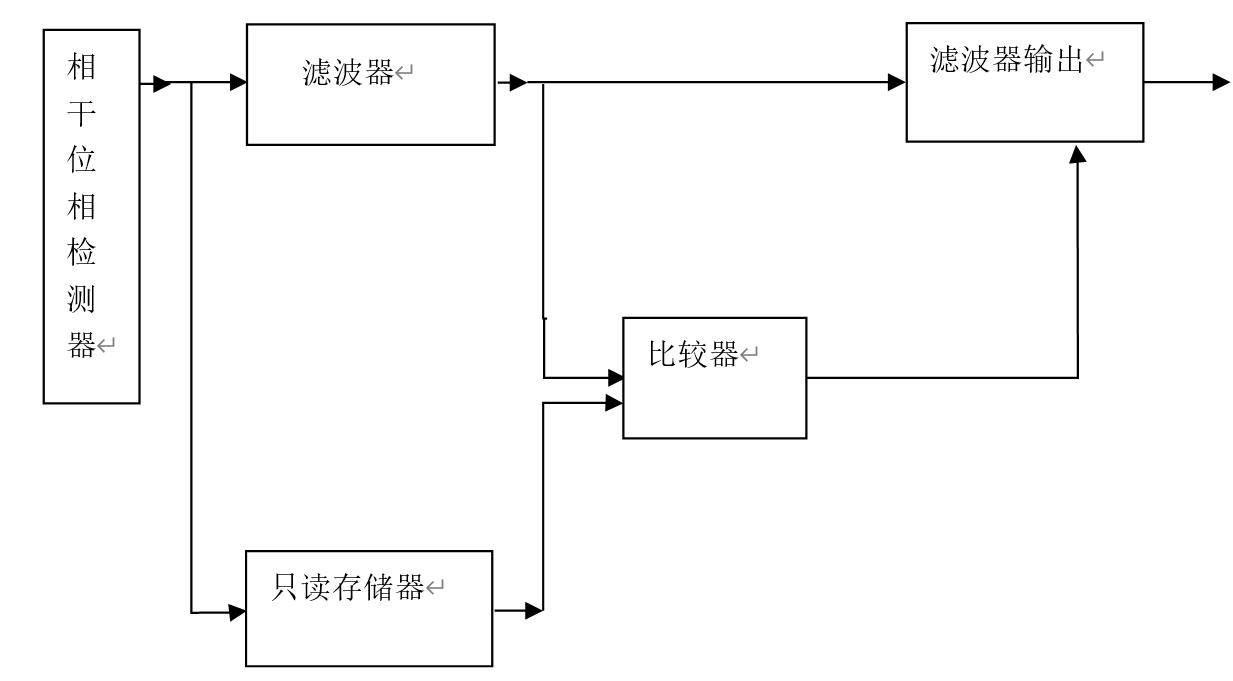
MTD流程图
径向速度退模糊¶
该研究对径向速度(V)的质量控制主要也是对径向速度进行退模糊,尤其在高强度风的情况下进行退模糊,利用科罗拉多州立大学(CSU)提出的自适应算法寻找速度模糊的距离库,并将该距离库观测到的风场和附近距离库的风场数据进行比较分析,如果该算法确认该径向速度值折叠(模糊),则利用雷达系统最大不模糊速度信息对该观测进行退模糊。
\(x(k)\) 表示输入信号, \(y(k)\) 表示输出信号, \(d(k)\) 表示期望信号,\(F\) 是输入、输出和参考信号的一个函数,即 \(F = F[e(k)] = F[x(k), y(k), d(k)]\) ,自适应算法试图使函数 \(F\) 达到最小化,从而 \(y(k)\) 与 \(d(k)\) 近似相等,使得参数 \(\theta (k)\) 收敛到 \(\theta_0\) ,\(\theta_0\) 为导致目标函数 \(F\) 最小化的最优系数构成的集合(Paulo S.R. Diniz,2014)。
观测误差的确定:对比使用Hollisworth 1986方法、Desroziers G 2001方法、Desroziers G 2005方法,诊断雷达反射率和径向速度资料的观测误差,在对同化预报效果进行对比检验的基础上,选择合适的观测误差诊断方法进行应用。
卫星资料的质量控制与同化¶
近年来,直接同化卫星红外和微波亮温资料已经显著提高了数值天气预报的效果, 在不断完善和提高晴空(clear-sky)卫星资料的同时,云区卫星资料同化的研究也得到了很大突破,并且已经实现了实时业务同化晴空和云区的微波卫星资料。比如,欧洲中期预报中心(ECMWF)实现业务同化all-sky微波水气通道卫星资料后,全球五天天气预报评分提高了3%。 另外,美国国家环境预报中心(NCEP)也已经业务实时同化all-sky微波卫星资料(AMSUA,ATMS)。然而,虽然在同化红外波段云区卫星资料方面虽然也有大量研究,但还没有实现业务化,许多方案还在不断地探究和试验,数值预报业务部门对于红外卫星资料的同化还停留在晴空条件下。卫星资料同化的进步主要来自于对卫星资料使用区域的扩展,偏差订正和观测误差相关性的研究,以及辐射传输模式技术上的不断提高。虽然卫星资料同化技术的科研和业务使用上都取得了巨大进步,但是,如何在大量的卫星数据中提取真正有用的信息始终是同化卫星资料过程中首先需要解决的问题,尤其在当前卫星资料时空分辨率的显著提高,卫星的数目也在增加的情况下。那么,卫星资料质量控制就成为这一关键问题中的第一步,首先要去除质量不合格的资料点,为提取有用信息扫除障碍。比如,在同化晴空卫星资料的时候,错误地同化了受到云或者雨影响的资料,就会将本来是晴空的地方的温度湿度降低,造成负的影响。卫星资料控制是一个非常复杂的过程,针对于不同的卫星, 不同的探测仪器,不同的通道,不同的地形表面都需要有相应的质量控制。下面质量控制方案主要是针对同化红外(Infrared) 波段卫星资料的质量控制,而云检测方案主要是针对静止卫星的红外Imager通道的。目前数值预报业务中已经同化使用的红外卫星亮温资料大概包括:搭载在极轨卫星上的CrIS(Suomi-NPP和NOAA-20),IASI( Metop-a 和Metop-b ,AIRs(Aqua), 以及搭载在静止卫星上的 SEVIRI (MSG-10/11),ABI(GOES-16/17),AHI (Himawari-8)。
红外卫星资料的质量控制:¶
目前,同化晴空红外卫星资料主要有两种途径,一种是同化经过云检测后,将有云地区的观测点去掉后的晴空资料产品(CSR),比如EUMETSAT的MSG SEVIRI CSR产品, NOAA NESDIS的GOES-16 ABI CSR产品,以及 Himawari-8的CSR产品。这些产品已经稳定地在数值预报业务中使用。另外一种是读入原始的all-sky卫星亮温资料,但是要在资料进入同化系统之后进行云检测,并且要用到模式背景场的信息,将有云地方的资料剔除,只保留晴空条件下的亮温资料。这些资料主要是CrIS (Suomi-NPP和NOAA-20),IASI( Metop-a 和Metop-b ),AIRs(Aqua),也在数值预报同化中稳定使用。那么对于后者,云检测将成为质量控制步骤当中重要的一步;而对于前者CSR产品,虽然已经是晴空产品,但还需要根据晴空产品提供的误差可信度,晴空可信度等做进一步的质量控制,确保所用资料没有任何云雨的影响。以下所列红外卫星资料所有有需要做的质量控制方案是在同化,具体开发时可以有针对性地挑选适合所使用卫星资料的方案:
- 针对地形高度较高地区的卫星资料质量控制,对于静止卫星Imager资料(如ABI,SEVIRI,Himawari),剔除在地形高度1000米以上地区的卫星资料;而对于极轨卫星资料,则减少地形高度2000米以上地区的卫星资料权重。
- 针对卫星扫描特征的质量控制,由于卫星扫描边缘上的资料精度相对较低,这一区域的卫星资料必须剔除. 判断标准一般是对于静止卫星将天顶角(satellite zenith angle)大于65度地区的卫星资料剔除, 而对于极轨卫星将卫星天顶角大于90度的星下点资料剔除。
- 针对云的质量控制,即云检测。上面已经提到不论是极轨卫星搭载的高光谱红外通道的原始all-sky资料,还是搭载在静止卫星上的Imager通道的CSR产品资料都需要进行严格的云检测才能保证正确地同化晴空卫星资料。对于晴空卫星资料产品(CSR)由于已经经过了云检测,在同化系统中将不重复,而是有针对性的做进一步的云检测, 如去除晴空可信度小于70%的资料,去除标准差(standard deviation)大于某一范围的资料等。对于所用资料为all-sky的情况下,需要在同化系统中运用Eyre and Menzel (1989)的方法,计算出每一个观测点上的云分数(cloud fraction), 将所有cloud fraction大于0的观测点都剔出掉。
- 针对地表温度或surface emissivity卫星资料质量控制,这一步骤是在云检测后,针对绝对晴空条件下不同地表类型(陆地,海洋,冰,雪)sufface emissivity 不同对于卫星资料的影响不同所做的质量控制。地表类型信息一般可以用卫星资料提供的,或者借助数值模式里的地表类型。
- 最后一步是gross check,即计算所有资料点上的观测卫星资料亮温和模式模拟出得卫星亮温的差(O-B),在O-B的绝对值大于一定范围(一般设定3-5K)的资料将被剔除。这一步需要数值模式(如WRF)的气象背景场,包括温度、湿度阔线等,经过辐射传输模式(如CRTM)模拟出相应卫星亮温资料,再进行比较和质量控制。
静止卫星红外通道资料的云检测:¶
将all-sky卫星亮温资料处理成晴空产品需要严格地云检测过程,这一过程是和资料同化系统完全独立的,可以认为是一个资料预处理过程,完全不同于上面 3)所提到的在同化系统中进行云检测。由于目前静止卫星所提供的资料都有非常高的时空分辨率,如新一代的SEVIRI,ABI,AHI等星下点分辨率达到2-3公里,每15分钟扫描一次所覆盖区域,就使得进行精确复杂的云检测,将云影响到的资料剔除出去,从而产生晴空产品(CSR),在进行同化。
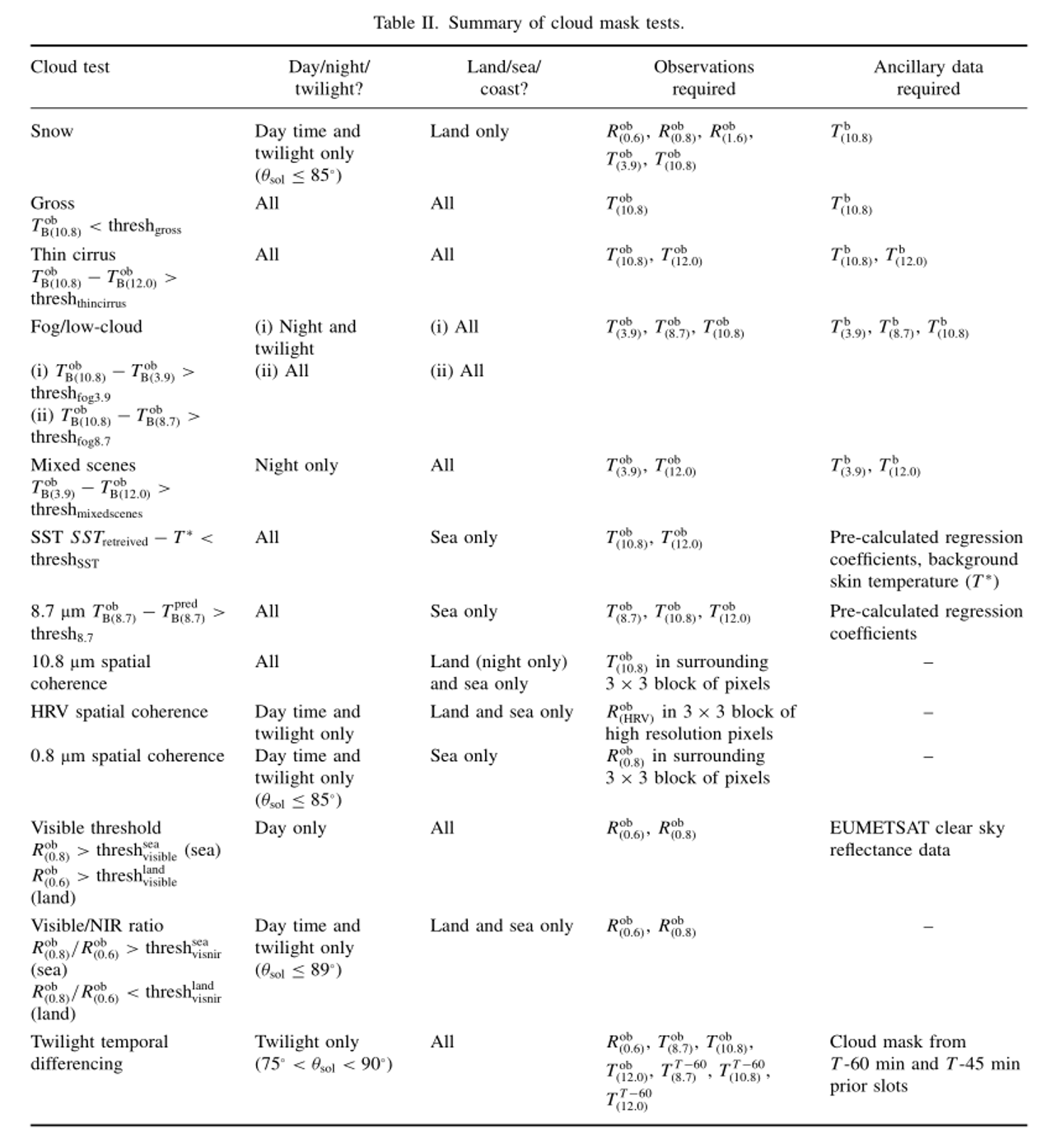
目前国际上,对于云检测方案研究成果主要有:基于GOES-R的云检测(Heridinger, 2011),基于SEVIRI 的云检测(Hocking et al,2010)和(Derrien and Gleanu, 2005)。这三种方案在基本原理上是相同的,但在具体的测试方案和定义cloud mask 的标准域值中略有不同。SAFNWC SEVIRI (Derrien and Gleanu,2005)云检测方案也类似采用一系列阈值测试进行云分析,与英国气象局SEVIRI云检测方案(Hocking et al,2010)的不同之处在于如何确定测试阈值,SAFNWC基于事先由大量离线辐射传输模拟计算出的查找表确定测试阈值,该查找表由诸如太阳天顶角和卫星天顶角之类的几何变量、NWP场(例如表面温度等)以及其它辅助数据(例如海拔和气候数据)来索引。结合英国气象局(UK Met office) SEVIRI云检测方案 (Hocking et al, 2010)和SAFNWC SEVIRI 云检测方案(Derrien and Gleau, 2005)等方案,概括来讲主要运用红外波段和可见光波段卫星亮温值进行云检测。
英国气象局(UK Met office) SEVIRI云检测方案基于一系列的阈值测试来生成SEVIRI云盖(cloud mask),如下表所示,主要的阈值测试包括雪测试、总测试、薄卷云测试、雾/低云测试、混合测试、海面温度测试、8.7μm测试、10.8μm空间连贯性测试、高分辨率可见空间连贯性测试、0.8μm空间连贯性测试、可见阈值测试、可见/近红外比值测试、黄昏/黎明低云时变算法等。综合考虑14种云检测的见过,对于任何一点,只要满足以上任何一条有云的标准,这一点将被定义为是有云的,这一点将会被剔除。只有在所有这14种都显示没有云的情况下,这一点才会被定义为绝对的晴空。综合利用红外波段和可见光波段交叉检测能够相互订正和补充在特殊地表类型,在黑夜和日落时分等特殊时段的云特征,以及细小的云。这无疑是准确使用卫星观测资料非常关键的一步预处理,这不仅能够帮助提高同化晴空卫星资料的可靠性,而且为同化有云卫星资料提供了有用的参考条件(cloud mask),这对于资料进入同化系统之后进一步做偏差订正和质量控制都非常有用。
以上所述卫星资料质量控制方案和云检测方案是对卫星红外通道亮温资料通用的,但这并不代表只有这些方案需要做,因为,每种卫星都有它本身的观测特征,仪器设计上也许会稍有不同,新的卫星新的仪器也会在不论硬件还是软件上增加不同的新观测技术。这就需要我们在做质量控制和同化之前要对这些信息充分了解,洞察资料本身提供的不同的误差可信度等设计出量身定做的质量控制方案,才能达到对任何一颗卫星任何一种观测仪器都能最大限度地同化正确的资料提高数值预报的目的。
地波雷达质控与同化模块¶
在本项目中,地波雷达的观资料将首先被反演成具有经纬度信息的风向和风速观测,之后以风向风速观测的方式同化到GSI中,其质控流程按照地面和探空观测的流程进行。本模块的作用是评估地波雷达反演观测资料对同化和预报的影响,同时为地波雷达反演质量提供参考依据。
后处理与诊断模块¶
基于天气学形成机理及WRF后处理诊断模块UPP,诊断输出环渤海大风大雾等海上气象要素的预报产品,UPP诊断输出的物理量代码如下表所示,对海洋预报有特别意义的诊断变量以红色标出。同时利用美国国家大气科学研究中心的专业绘图软件NCL对预报结果进行实时诊断绘图,绘图任务和模式的预报同步进行。
产品显示模块¶
基于模式预报结果和NCL绘图软件,以图形形式实时输出逐小时海上风、雾等预报产品,预报产品在东北区域气象中心中尺度数值预报显示系统实时显示,供使用人员进行点击调阅、拷贝。
- reflectivity
- 500mb vort
- soil temp at 10cm
- surface CAPE
- 250mb wind
- soil moisture at sfc
- surface CIN
- 250mb wind magnitude
- soil moisture at 1cm
- mixed CAPE
- visibility
- soil moisture at 4cm
- most unstable CAPE
- cloud top height
- soil moisture at 10cm
- most unstable layer CAPE
- ceiling
- precip type
- lightning potential
- total cloud cover
- 925mb temp
- 10m wind
- low-level cloud cover
- 850mb temp
- 80m wind
- mid-level cloud cover
- 850mb wind
- 1h 80m wind speed change
- high-level cloud cover
- 850mb wind magnitude
- 10m wind gust
- aviation flight rules
- 850 RH
- skin temp
- outgoing longwave radiation
- 850-500mb mean RH
- 2m temp
- Incoming shortwave radiation
- RH with respect to PW
- 2m potential temp
- fog
- 700mb temp
- 2m temp
- skin temp
- downward long-wave radiation
- 700mb vvel
- 2m dew point
- downward short-wave radiation
- 500mb temp
- 2m RH
- ground heat flux
- snow depth
- 3h pressure change
- latent heat flux
- 1h precip
- precipitable water
- sensible heat flux
- 1h convective precip
- snow water equiv
- PBL height
- total acc precip
- 1h snowfall
- soil temp at 1cm
- total acc snowfall
- soil temp at 4cm
检验模块¶
模式检验评估不仅是发展预报系统的重要组成部分,而且可以用来评价模式预报的准确性,从而为用户提供客观的预报依据。事实上,由于模式预报系 统的底层物理过程十分复杂,其预报结果存在很大的不确定性,因此,通过评估检验来获得模式的特定属性和外在表现就成为用户研究和应用模式的重要手段。模式检验中最古老的方法是通过目视进行误差主观对比分析, 尽管主观的目视误差分析或天气个例分析能够准确给出模式对降水系统诸如锋面、雨带预报性能的详细描述,然而目视分析存在显著缺陷,它一方面无法客观分析海量数据,另一方面通过目视检验获得的结论也具有主观性和非定量性,因此很难为用户提供有效的判别标准。随着模式检验需求的不断扩大和气象科研工作者的持续努力,一系列客观的模式评估检验方法得到了快速发展。
MET(Model Evaluation Tools)是美国国家大气研究中心(National Center for Atmospheric Research, NCAR)数值预报发展试验中心(Developmental Testbed Center,DTC)最新研发的数值预报检验、评估系统,其主要目的不仅在于为模式开发人员提供模式性能的测试工具,而且方便最终用户通过MET来判别模式的预报能力,进而获得预报相应的预报指标。MET系统提供了丰富的站点、格点数据接口程序,它的核心组件集成了模式经典方法评估检 验,高分辨率模式诊断分析,集合预报、概率预报、台风路径等多种最先进的模式检验评估算法。为了方便用户使用,MET系统还提供基于R语言的多种绘图脚本。
MET系统包括了传统的经典检验方法,这些方法 在模式检验中已得到了较好的应用,因此这里仅简单列出MET计算的一些主要统计技巧评分。在计算这些 评分时,MET也利用了两变量的列联表来将事件进行分类,然后将预报事件与观测事件进行匹配并计算一系列评分指数,对于可分为两种类型的离散形变量主要包括:预报偏差Bias、胜算比OR(Odds Ratio)、GSS(Gilbert Skill Score)或ETS(Equitable Threat Score)评分、准确率ACC(Accuracy)等。对于可分为多种类型的离散型变量来说,采用了n×2的列联表将不同分级上事件发生的频率分别归类来计算评分指 数,这种方法也用于检验概率预报中不同事件发生概 率的准确性。针对离散型变量,MET主要计算了标准差(STDEV)、距平相关系数(ACC)、斯皮尔曼相 关系数(SP_CORR)、Kendall等级相关系数(KT_CORR)、均方根误差(RMSE)、误差百分位数等相关指标
海上风、雾诊断预报产品输出与显示¶
大风的诊断模式¶
海上大风的诊断依据行星边界层高度的混合动量(Mixing Down Momentum)来计算。
雾的诊断模式¶
! This module computes horizontal visibility at the ! surface or lowest model layer, from qc, qr, qi, and qs. ! qv--water vapor mixing ratio (kg/kg) ! qc--cloud water mixing ratio (kg/kg) ! qr--rain water mixing ratio (kg/kg) ! qi--cloud ice mixing ratio (kg/kg) ! qs--snow mixing ratio (kg/kg) ! tt--temperature (k) ! pp--pressure (Pa) ! ! If iice=0: ! qprc=qr qrain=qr and qclw=qc if T>0C ! qcld=qc =0 =0 if T<0C ! qsnow=qs and qclice=qc if T<0C ! =0 =0 if T>0C ! If iice=1: ! qprc=qr+qs qrain=qr and qclw=qc ! qcld=qc+qi qsnow=qs and qclice=qc ! ! Independent of the above definitions, the scheme can use different ! assumptions of the state of hydrometeors: ! meth='d': qprc is all frozen if T<0, liquid if T>0 ! meth='b': Bocchieri scheme used to determine whether qprc ! is rain or snow. A temperature assumption is used to ! determine whether qcld is liquid or frozen. ! meth='r': Uses the four mixing ratios qrain, qsnow, qclw, ! and qclice ! ! The routine uses the following ! expressions for extinction coefficient, beta (in km**-1), ! with C being the mass concentration (in g/m**3): ! ! cloud water: beta = 144.7 * C ** (0.8800) ! rain water: beta = 2.24 * C ** (0.7500) ! cloud ice: beta = 327.8 * C ** (1.0000) ! snow: beta = 10.36 * C ** (0.7776) ! ! These expressions were obtained from the following sources: ! ! for cloud water: from Kunkel (1984) ! for rainwater: from M-P dist'n, with No=8e6 m**-4 and ! rho_w=1000 kg/m**3 ! for cloud ice: assume randomly oriented plates which follow ! mass-diameter relationship from Rutledge and Hobbs (1983) ! for snow: from Stallabrass (1985), assuming beta = -ln(.02)/vis !
基于模式预报结果和NCL绘图软件,以图形形式实时输出逐小时海上风、雾等预报产品,预报产品在东北区域气象中心中尺度数值预报显示系统实时显示,供使用人员进行点击调阅、拷贝。
| 产品名称 | 分辨率 | 范围 | 时间分辨率 | 时效 |
|---|---|---|---|---|
| 同化分析气象格点场 | 9公里 | 全国范围(20°-65°N,90°-140°E) | 逐小时 | |
| 3公里 | 环渤海海域 (34°-41°N, 117°-127°E) | 逐小时 | ||
| 风速、风向、雾预报格点场 | 3公里 | 环渤海海域 (34°-41°N, 117°-127°E) | 逐小时 | 72小时 |